Системы координат.
Математическое моделирование и экспериментальная отработка систем разделения реактивных снарядов.
Часть 1
Где тк, rk, V — масса, радиус вектор и скорость центра масс корпуса; d'/dt — относительная производная в связанной системе координат; со — угловая скорость корпуса; Fa, F3, G — главные векторы аэродинамического сопротивления и сил реакций ПЭ, сила тяжести корпуса; К — кинетический момент корпуса; Ма, Мэ — главные моменты сил аэродинамического сопротивления и реакций ПЭ относительно центра масс… Читать ещё >
Системы координат. Математическое моделирование и экспериментальная отработка систем разделения реактивных снарядов. Часть 1 (реферат, курсовая, диплом, контрольная)
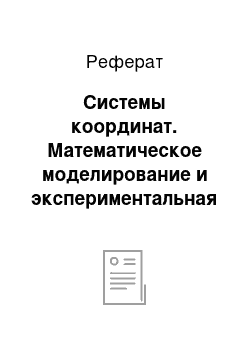
Для задания положения корпуса в пространстве используются следующие системы координат (рис. 5.4):
- • OXrYrZr — неподвижная стартовая система координат, неизменно связанная с инерциальной системой отсчета;
- • CKXYZ — промежуточная (совмещенная стартовая) система координат, с началом в центре масс корпуса, осями, параллельными осям стартовой системы координат (СКХ ft ОкХг, CKY [| ОУг, CKZ ft OZr), и базисом (Хр, Уг, 5р);
- • QXjYjZ! — связанная с корпусом система координат;
- • СКХ, QYj, CKZj —главные центральные оси инерции корпуса;
- • (*ь Уъ 2]°) — базис, определяющий систему координат QXjYjZj. Далее компоненты этого базиса обозначаются также (xi0, x2°, Хз).
Для задания положения ПЭ в корпусе вводятся (см. рис. 5.3) следующие системы координат:
- • С"^, г|^п — система координат, неизменно связанная с ПЭ с номером п;
- • С?п, Спгр, С"СП — главные центральные оси инерции ПЭ;
- • ось С?п направлена вдоль направляющей ПЭ п в сторону его ожидаемого движения;
- • 0"^пг|п^п — система координат, неизменно связанная с корпусом, ее оси параллельны осям системы координат Сп^плп^п
- • (к", к2, К3) — базис, определяющий систему координат 0"^пг|"^п.
Положение точки Оп в связанной системе координат задается радиусом;
вектором г = СкОп. Положение связанной системы координат относительно промежуточной CKXYZ определяется матрицей А* = — Ю ij = !•.

Рис. 5.4. Системы координат
Угловое положение системы координат, связанной с ПЭ п относительно связанной с корпусом системы координат задается матрицей направляющих косинусов А" = {a[J}3y = ].
Векторные уравнения движения корпуса в пространстве
В процессе разделения корпуса и ПЭ корпус совершает свободное движение в пространстве. Задание положения корпуса в пространстве с помощью традиционных для баллистики углов ориентации затруднено появлением в дифференциальных уравнениях особенностей, связанных с обращением в ноль тригонометрических функций в знаменателях правых частей уравнений. Этим недостатком обладает подход, связанный с использованием углов тангажа, рыскания и крена для задания положения связанной системы координат относительно промежуточной и углов атаки и скольжения для задания положения связанной системы координат относительно скоростной [70, 71, 250]. Несколько меньшее число особенностей возникает в уравнениях при использовании полускоростной системы координат (системы Резаля [209]) и задании положения связанной системы координат относительно полускоростной с помощью углов Эйлера в случае осесимметричного тела. Указанные подходы, как и методика ГОСТ В 24 288—80 [60], позволяют рассчитывать лишь правильное движение снаряда или близкое к таковому. Во всех случаях оказывается необходимым выделение особенностей при счете и восстановление углов ориентации при выходе из области, где эти углы не определены. Эти неудобства не возникают при использовании для задания углового положения твердого тела параметров Родрига — Гамильтона или Кэйли — Клейна [15, 35,40, 72,111,172, 210]. Возможно также использование направляющих косинусов в сочетании с интегрированием уравнений Эйлера — Пуассона [15, 35, 72, 205, 210]. В рамках настоящей работы задача внешней баллистики твердого тела решается с использованием уравнений Эйлера — Пуассона. Это обусловлено тем, что при задании сил и моментов, действующих на осесимметричное тело, движущееся в атмосфере, приходится вычислять угол нутации. Кроме того, направляющие косинусы непосредственно используются при проектировании силы тяжести на оси связанной системы координат в уравнениях движения центра масс. В этих условиях преимущества решения задачи в параметрах Родрига — Гамильтона или Кэйли — Клейна, заключающиеся в сокращении числа дифференциальных уравнений, становятся неочевидными, так как на каждом шаге по времени все равно приходится вычислять матрицу направляющих косинусов Ар = {(Ху}3у = 1. Это определение сравнимо по объему вычислений с решением двух дифференциальных уравнений, которые являются «лишними» в системе шести уравнений Пуассона по сравнению с четырьмя уравнениями для параметров Родрига — Гамильтона. Кроме того, вычисление матрицы направляющих косинусов необходимо для представления расчетной информации в требуемой форме.
Уравнения движения корпуса в пространстве в векторной форме включают уравнения движения центра масс (5.29), (5.30), уравнение изменения кинетического момента (5.31), уравнения Пуассона для относительных производных ортов (Хр, у?) стартовой системы координат.

где тк, rk, V — масса, радиус вектор и скорость центра масс корпуса; d'/dt — относительная производная в связанной системе координат; со — угловая скорость корпуса; Fa, F3, G — главные векторы аэродинамического сопротивления и сил реакций ПЭ, сила тяжести корпуса; К — кинетический момент корпуса; Ма, Мэ — главные моменты сил аэродинамического сопротивления и реакций ПЭ относительно центра масс корпуса.
Главный вектор аэродинамических сил представляется в обычно принятой в баллистике тел вращения форме [71]—[60].

где Rx = -Rxx°v — сила лобового сопротивления; Rn = Rny°pl — нормальная сила; R^ = -Rmz° — сила Магнуса; x°v=^-;z° = *v*XJ0 ;y°pl =z°xx°v.
Главный момент аэродинамических сил представляется в форме.

где Мст = -Ma.z" — статический (опрокидывающий или стабилизирующий) момент; Г = Гх° — осевой тушащий момент; K = Kyly®+K2lzJ — экваториальный тушащий момент; Мма = Мшу°р — момент Магнуса;
Ур =zp°xx1°.