Магнитные усилители.
Технические средства автоматизации и управления
Принцип работы такого усилителя рассмотрим на примере так называемого дросселя с подмагничиванием, изображенного на рис. 7.9. На этой схеме обмотка управления Wy питается постоянным напряжением U_ входного сигнала, а рабочая область переменного тока /н определяется переменным напряжением U_. Последовательно с рабочей обмоткой Wp включено сопротивление нагрузки Rн. Переменный ток /н в рабочей… Читать ещё >
Магнитные усилители. Технические средства автоматизации и управления (реферат, курсовая, диплом, контрольная)
Магнитным усилителем (МУ) называется электромагнитное устройство, предназначенное для усиления электрических сигналов, в котором используется зависимость магнитной проницаемости ферромагнитных материалов, помещенных в переменное магнитное поле, от величины постоянного подмагничивающего поля, создаваемого или изменяемого входным сигналом.

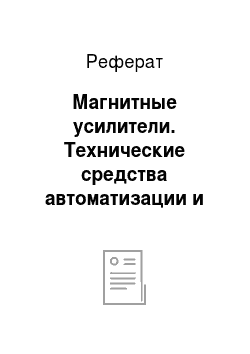
Рис. 7.9. Схема дросселя с подмагничиванисм.
Сигнал постоянного тока в магнитных усилителях преобразуется в сигнал переменного тока, поэтому МУ часто используют в качестве первого каскада усиления для электронного усилителя переменного тока. МУ широко применяются в схемах автоматики вследствие своей высокой надежности и долговечности, обусловленных отсутствием движущихся частей и нечувствительностью к механическим перегрузкам, устойчивости к работе при высоких и низких температурах и в условиях повышенной влажности, а также вследствие присущих им высокого КПД и коэффициента усиления и возможности усиления маломощных сигналов постоянного тока.
Недостатком магнитного усилителя является инерционность, определяемая его высокой индуктивностью, что ограничивает его применение в системах автоматики, требующих минимального времени реагирования, например, в следящих системах.
Принцип работы такого усилителя рассмотрим на примере так называемого дросселя с подмагничиванием, изображенного на рис. 7.9. На этой схеме обмотка управления Wy питается постоянным напряжением U_ входного сигнала, а рабочая область переменного тока /н определяется переменным напряжением U_. Последовательно с рабочей обмоткой Wp включено сопротивление нагрузки Rн. Переменный ток /н в рабочей обмотке Wp определяется соотношением.

где 
Индуктивность L определяется по формуле.

где р0 — магнитная проницаемость вакуума, Г/м; S— площадь сердечника дросселя, м2; / — длина средней силовой линии в сердечнике дросселя, м; wp — число витков рабочей обмотки И^р; р — магнитная проницаемость сердечника дросселя для переменной составляющей магнитного поля, Г/м. Величина р определяется из соотношения.

где Я — напряженность магнитного поля, а В — его индукция.
При Uм = U_ = О Я, = 0, а /и определяется магнитной проницаемостью в положении на кривой намагничивания, симметричном относительно оси ординат. При Unx Ф О U_ Ф 0 и Я, Ф 0. Это смещает рабочую точку на кривой намагничивания. Значит, с увеличением постоянного тока подмагничивания магнитная проницаемость сердечника уменьшается, что приводит к уменьшению индуктивного сопротивления дросселя и к увеличению тока нагрузки /н.
Если кривая намагничивания имеет большую крутизну, то небольшое изменение входного сигнала приводит к значительному изменению мощности нагрузки.

Рис. 7.10. Схема магнитного усилителя из двух сердечников.
Однако такой дроссель применять в качестве магнитного усилителя нецелесообразно, так как его рабочая обмотка Wp создает в сердечнике переменный магнитный поток, так что в управляющей обмотке Wy наводится ЭДС, противодействующая входному сигналу. Это снижает КПД усиления и вносит дополнительные шумы. Поэтому практически простейший магнитный усилитель собирают из двух сердечников, как показано на рис. 7.10.

Рис. 7.11. Статическая характеристика магнитного усилителя из двух сердечников.
Статическая характеристика такого усилителя приведена на рис. 7.11.
В этом магнитном усилителе /н0 — начальный холостой ток при 1у = 0. Рабочую обмотку Wp наматывают таким образом, чтобы магнитные потоки, создаваемые ею в обоих сердечниках, действовали навстречу друг другу, и ЭДС, индуцируемые ими в обмотке управления, взаимно компенсировались. Это и показано на рис. 7.10. Такая взаимная компенсация составляет принципиальное преимущество этой схемы перед схемой с дросселем насыщения.
Однако для рассмотренных выше схем характерно то, что входным сигналам разного знака, но равным по модулю соответствуют одни и те же значения выходного сигнала. Это видно из рис. 7.11, где статическая характеристика магнитного усилителя, состоящего из двух сердечников, представляет собой график, симметричный относительно оси ординат. Значит, такой усилитель не реагирует на знак входного «сигнала.
Чтобы сделать магнитный усилитель чувствительным к знаку входного сигнала, не изменяя физическую природу явлений, положенных в основу его работы, нужно сместить начальную рабочую точку на его статической характеристике. Это достигается путем создания дополнительного постоянного магнитного поля за счет введения дополнительной обмотки постоянного тока, которая так и называется обмоткой смещения. Схема такого магнитного усилителя изображена на рис. 7.12.
В магнитном усилителе со смещением ток /н в нагрузке изменяется по знаку в зависимости от полярности сигнала управления. При /у = 0 величина тока 1п1) уже не будет мини;

Рис. 7.12. Схема магнитного усилителя со смешением.
мальной. Значение /н будет расти или падать в зависимости от полярности сигнала /у.
Введение
начального подмагничивания (начального смещения) повышает также коэффициент усиления для малых значений /у. Это обусловлено тем, что области малых значений /у будет соответствовать участок статической характеристики усилителя, обладающий значительной крутизной, как это видно на рис. 7.13.

Рис. 7.13. Статическая характеристика магнитного усилителя со смещением.